-

FP1 : Pousser le robot adverse hors du dohyo
FC1 : Résister aux attaques du robot adverse
FC2 : Ne pas détériorer la surface plane
FC3 : Être fabriquer par les collégiens
FC4 :Respecter le réglement du robot sumo
FC5 : Respecter le budget
FC6 : Être esthétique
Maxime
 votre commentaire
votre commentaire
-
Pour la fabrications des robots zumo il y a 3 capteurs possibles avec chacun leurs avantages et défauts :
-Les Capteurs d'ennemi :Les capteurs d'ennemi utilisent le principe de l'écho , l'infrarouge et du laser pour déterminer la distance à laquelle se trouve l'ennemi.
votre commentaire
-
Il existe 3 type de moteur pour le robot zumo
-le moteur a courant continu (moteurs les
plus simples, constitués d’une partie fixe composée
d’aimants permanents (stator) et d’une partie mobile
composée de bobines (rotor).-Le moteur pas a pas
Ces moteurs reprennent le principe du moteur à courant continu
classique, mais avec un nombre de bobines supérieur qui se trouvent
cette fois-ci sur le stator et les aimants permanents sur le rotor.-Les servomoteur à rotation continu
Les servomoteurs à rotation continue sont en réalité
des servomoteurs classiques qui ont été modifiés en
supprimant les butées mécaniques qui limitent
habituellement le mouvement.Lucas ,Corentin
votre commentaire
-
notre coque a été crée avec du carton .Nous avons ajouter des ailes faite a base de carton , nous avons aussi mis des canons pour l'esthétisme ainsi que des propulseurs a l’arrière du bolide.un canon de char a été rajouté sur le dessus.
Nous l'avons nommé Joe la fusée.
Nous avons coloriée le bolide avec des feutre de tableau.
il va tous péter !
Lucas Corentin
votre commentaire
-
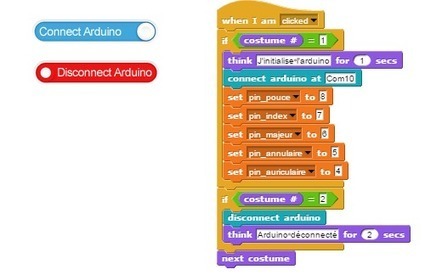
Pour programmer un robot sumo il faut utiliser Blockly qui est un logiciel permettant de créer différent programme avec des blocks et les incorporer au robot sumo via Arduino qui sert a téléverser le programme dans le robot
Maxime Corentin
votre commentaire





|
|
|
|